Signed Distance Field (SDF) using FPGA
In this work, we focused on generating Signed Distance Fields (SDF) from convex objects using Xilinx FPGA. Signed Distance Fields (SDF) calculations are common in robot motion planning, obstacle avoidance, and computer graphics.
Signed Distance Field
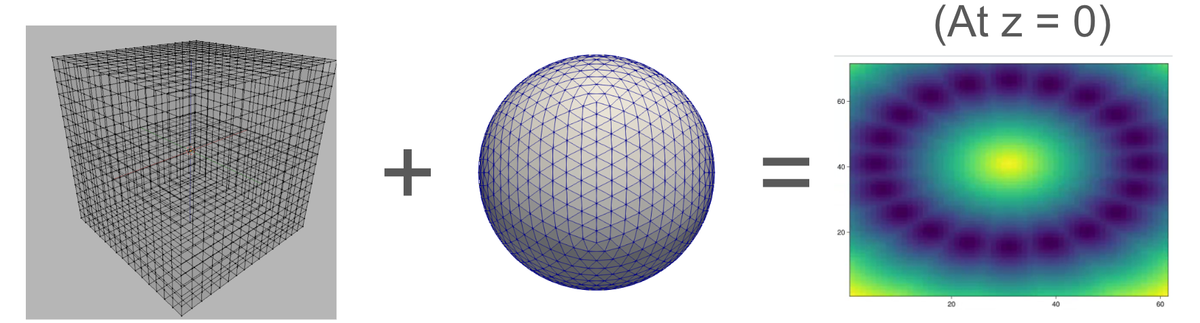
Signed Distance Fields (SDF) represents the distance from a given point in space to the nearest surface of a shape or object. The "signed" aspect indicates that this distance is positive when the point is outside the object and negative when it is inside. This allows the SDF to convey not just the proximity to an object's surface, but also the positional relationship of the point relative to the object's boundary. This technique is useful in various applications like rendering, collision detection, and simulating physical phenomena.
The CPU Approach
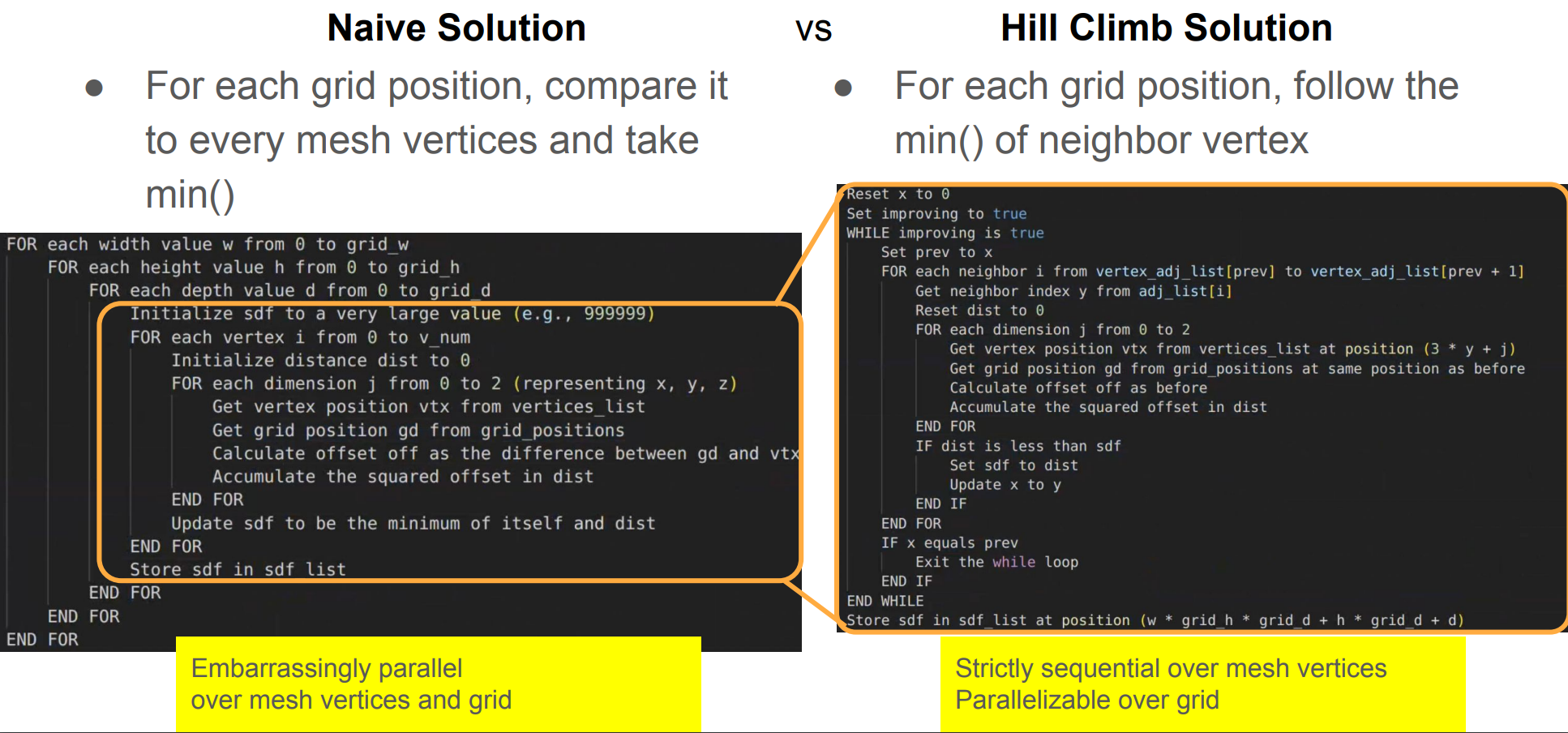
- Naive Solution: Calculates the distance from a point to every surface point of an object and then selecting the minimum distance. This method is simple to implement but can be computationally expensive, especially for complex objects or high-resolution fields.
- Hill Climb Solution: The hill climb algorithm starts with an initial solution and iteratively makes small changes, each time moving towards a solution that is closer to the object's surface. The process continues until no further improvements can be made or a certain condition is met. Since the objects in the scene are convex, the iteration of eventually converge to the closest point.
The case for using FPGA
The Hill Climb solution offers a significant performance advantage over the naive approach by only accessing and computing vertices on the search path. This approach, however, is inherently sequential and varies in the number of iterations needed to converge across the grid. This variability makes it a suitable case for FPGA, where GPUs falls short. FPGAs, with their reconfigurable logic, enable fine-grained load balancing across parallel cores. This adaptability allows FPGAs to maintain high efficiency and utilization, as they can dynamically redistribute tasks ( job stealing) to manage points in space requiring different numbers of iterations. This feature is particularly advantageous for algorithms like Hill Climb, where workload variability is a key challenge.
Performance & Efficiency Advantages
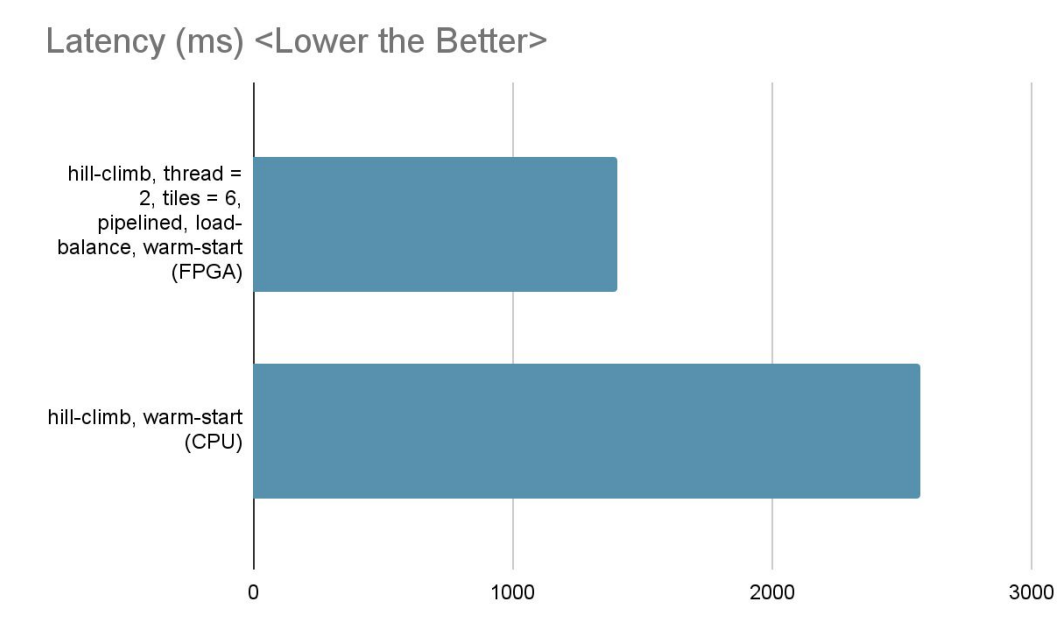
We achieved a significant reduction in latency (45.4% lower) on the Ultra96v2 board at 150 MHz compared to a sequential CPU at 1.5 GHz on the test scene.
Why this work may be useful
In robotics, where SDF calculation latency is critical, this FPGA-based solution offers a hardware-accelerated, energy-efficient alternative. Unlike GPUs, which might perform better by processing more grid points simultaneously but consume more energy, the FPGA can leverage the algorithmic efficiency of hill climbing methods. This makes FPGAs particularly suitable for scenarios demanding both high performance and energy efficiency, as they can optimize SDF calculations effectively without the energy intensity of brute-force GPU approaches.
Why this work may not be useful
In preliminary benchmarks, a brute-force GPU implementation on an RTX 3060 has proven faster than the FPGA solution. This comparison must also consider the extra human effort required for design space exploration when adapting the algorithm to new FPGA hardware. This process, necessary for optimizing performance on different FPGA platforms, can be time-consuming.
Verdict: Only useful in special use cases where absolute optimal effeicency / latency are required